









- Hotline-Zalo
- Phone : 0941300023





Sơ lược về động cơ DC| Khái niệm- Phân Loại & Điều khiển tốc độ

Động cơ điện 1 chiều là thiết bị ngoại vi được sử dụng rất rộng rãi do điều khiển đơn giản, giá cả phải chăng. Bài viết này để trao đổi về đặc tính, các phương pháp điều khiển, mạch điều khiển phổ biến của động cơ điện 1 chiều.

(Động cơ DC có nhiều ứng dụng trong thực tế)
1. Định nghĩa
Động cơ một chiều DC ( DC là từ viết tắt của "Direct Current Motors") là Động cơ điều khiển bằng dòng có hướng xác định hay nói dễ hiểu hơn thì đây là loại động cơ chạy bằng nguồn điện áp DC- điện áp 1 chiều(Khác với điện áp AC xoay chiều). Đầu dây ra của đông cơ thường gồm hai dây (dây nguồn- VCC và dây tiếp đất- GND). DC motor là một động cơ một chiều với cơ năng quay liên tục.
Khi bạn cung cấp năng lượng, động cơ DC sẽ bắt đầu quay, chuyển điện năng thành cơ năng. Hầu hết các động cơ DC sẽ quay với cường độ RPM rất cao ( số vòng quay/ phút). Tốc độ không tải của động cơ DC nếu không giảm tốc có thể đạt từ 1000RPM tới 40.000RPM.
Một ví dụ về động cơ DC RS775-9009 có tốc độ quay 22.000RPM cùng với hộp giảm tốc Planet
Ứng dụng của động cơ DC cũng rất đa dạng và hầu hết trong mọi lĩnh vực của đời sống. Trong tivi, trong đài FM, ổ đĩa DC, máy in- photo, máy công nghiệp...v...v.
2. Phân loại động cơ điện một chiều (đây là cách phân loại theo cách kích từ)
Động cơ điện 1 chiều phân loại theo kích từ thành những loại sau:- -Kích từ độc lập.
- -Kích từ song song.
- -Kích từ nối tiếp.
- -Kích từ hỗn hợp.
3. Cấu tạo và nguyên tắc hoạt động
Gồm có 3 phần chính stator( phần cảm), rotor ( phần ứng), và phần cổ góp- chỉnh lưu.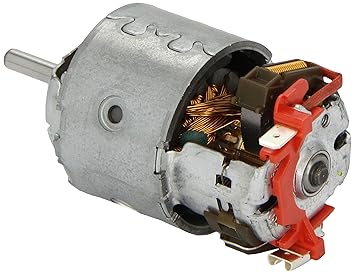
(Cấu tạo chi tiết động cơ DC với phần than lộ và phần rotor dây đồng)
- - Stator của động cơ điện 1 chiều thường là 1 hay nhiều cặp nam châm vĩnh cửu, hay nam châm điện.
- - Rotor có các cuộn dây quấn và được nối với nguồn điện một chiều.
- - Bộ phận chỉnh lưu, nó có nhiệm vụ là đổi chiều dòng điện trong khi chuyển động quay của rotor là liên tục. Thông thường bộ phận này gồm có một bộ cổ góp và một bộ chổi than tiếp xúc với cổ góp.
NGUYÊN LÝ HOẠT ĐỘNG
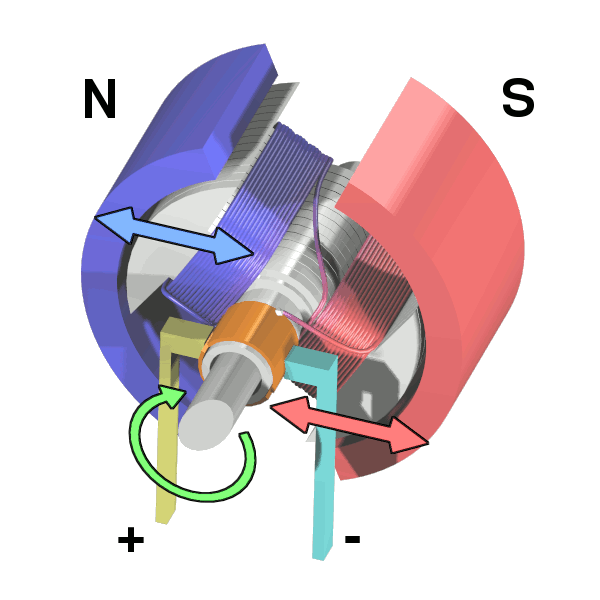
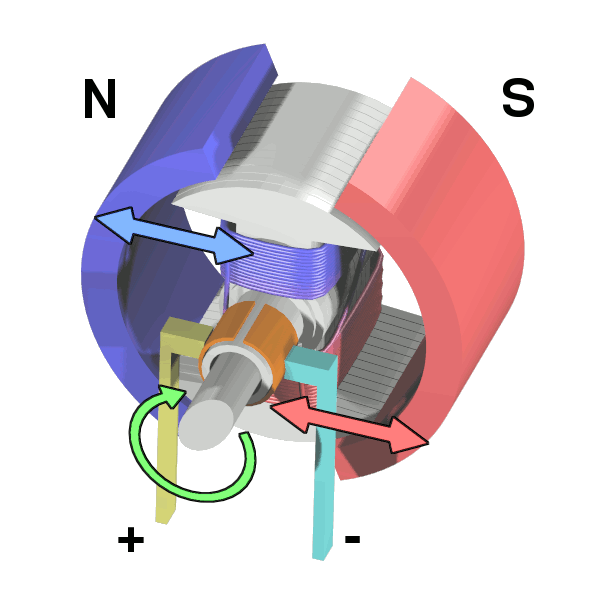

(Video Nguyên lý hoạt động của động cơ điện một chiều)
Nếu trục của một động cơ điện một chiều được kéo bằng 1 lực ngoài, động cơ sẽ hoạt động như một máy phát điện một chiều, và tạo ra một sức điện động cảm ứng Electromotive force (EMF). Khi vận hành bình thường, rotor khi quay sẽ phát ra một điện áp gọi là sức phản điện động counter-EMF (CEMF) hoặc sức điện độngđối kháng, vì nó đối kháng lại điện áp bên ngoài đặt vào động cơ. Sức điện động này tương tự như sức điện động phát ra khi động cơ được sử dụng như một máy phát điện (như lúc ta nối một điện trở tải vào đầu ra của động cơ, và kéo trục động cơ bằng một ngẫu lực bên ngoài). Như vậy điện áp đặt trên động cơ bao gồm 2 thành phần: sức phản điện động, và điện áp giáng tạo ra do điện trở nội của các cuộn dây phần ứng. Dòng điện chạy qua động cơ được tính theo biều thức sau:
I = (V_{Nguon}-V_{Phan Dien Dong})/R_{Phan Ung}
4. Đặc tính cơ của động cơ điện một chiều
Đặc tính cơ của động cơ điện là hàm có dạng M=f(w) hoặc w=f(M) trong đó w là vận tốc góc và M là mô mem.4.1 Đặc tính cơ của động cơ kích từ độc lập và song song
Đây là động cơ loại động cơ điện 1 chiều khá thông dụng trong một số máy loại nhỏ, cuộc thi robocon và đồ án của sinh viên.- Sơ đồ nối dây của động cơ điện kích từ độc lập
Cả 2 loại động cơ kích từ độc lập và kích từ song song đều có chung phương trình đặc tính cơ dạng.
- Đường đặc tính cơ và sơ đồ đấu dây của động cơ điện 1 chiều kích từ nối tiếp có dạng
5. Điều chỉnh tốc độ động cơ điện một chiều
- -Thay đổi điện áp phần ứng.
- -Thay đổi điện trở mạch rotor.
- -Thay đổi từ thông.
Sau đây cùng xét 1 vài mạch điều khiển động cơ DC. Để điều khiển điện áp phần ứng thường hay sử dụng nhất là phương pháp điều chế độ rộng xung (PWM).
- Khi R1 và L2 dẫn và L1 và R2 khóa thì dòng điện chạy theo chiều mũi tên xanh trong hình b động cơ quay theo chiều từ B sang A.
- Đối với mạch cầu H thì điều nghiêm cấm L1 và L2 cùng dẫn hoặc R1 và R2 cùng dẫn. Giả xử L1 và L2 cùng dẫn 1 lúc thì dòng điện từ dương nguồn qua L1 qua L2 về GND mà điện trở L1 và L2 rất nhỏ chính vì vậy dòng điện vô cùng lớn sẽ gây hỏng mạch hoặc phá hỏng L1 hoặc L2 hiện tượng này được gọi là hiện tượng trùng dẫn.
Để đề phòng hiện tượng này có 1 số loại ic chuyên dụng như IR2184, IR2103... hoặc nếu sử dụng L298 thì bản thân ic đã phòng chống được hiện tượng trùng dẫn rồi.
-Bài viết có sử dụng ảnh tư liệu của Cộng đồng cơ điện tử Việt Nam-